#| label: xarray plot
#| fig-cap: "xarray demo"
import xarray as xr
import numpy as np
import matplotlib.pyplot as plt
import cartopy.crs as ccrs
from matplotlib.animation import FuncAnimation
variables=['u-component_of_wind_height_above_ground','v-component_of_wind_height_above_ground']
dsw=xr.open_dataset('https://thredds.ucar.edu/thredds/dodsC/grib/NCEP/GFS/Global_0p25deg/Best')[variables]
from datetime import datetime, timedelta
starttime=datetime.utcnow()
starttime
inittime = datetime.utcnow().date().isoformat() ### Simulation startime..
endtime = starttime + timedelta(days=10)
finaltime=endtime.date().isoformat()
print(inittime)
print(finaltime)
lat_toplot = np.arange(5, 35.25, 0.25) # last number is exclusive
lon_toplot = np.arange(260, 310.25, 0.25) # last number is exclusive
dataw= dsw.sel(time=slice(inittime,finaltime),height_above_ground2=10, lon=lon_toplot, lat=lat_toplot)
u10=dataw['u-component_of_wind_height_above_ground'].values
v10=dataw['v-component_of_wind_height_above_ground'].values
lon=dataw.lon.values
lat=dataw.lat.values
l=10
U10=u10[l,:,:].squeeze()
V10=v10[l,:,:].squeeze()
vec_crs = ccrs.RotatedPole(pole_longitude=180.0, pole_latitude=90.0)
#central_rotated_longitude=0.0)
data_crs=ccrs.PlateCarree()
#print(dataw.time[l])
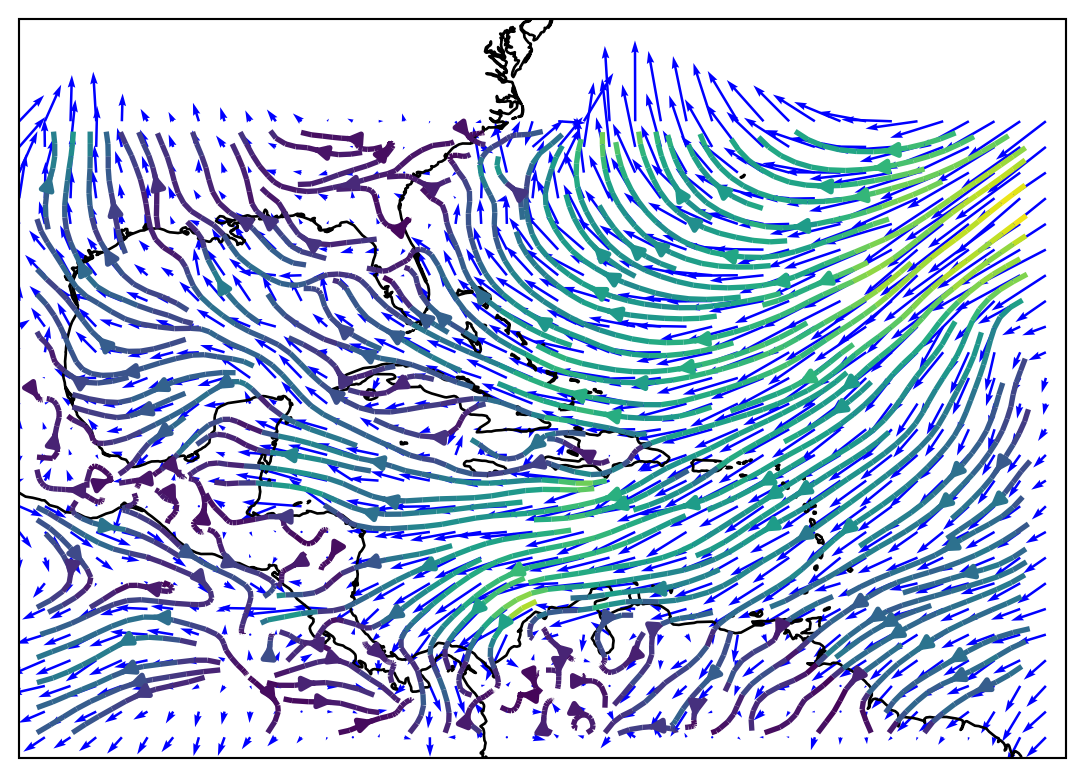
fig = plt.figure(figsize=(20, 5))
ax1 = fig.add_subplot(1, 1, 1, projection=ccrs.PlateCarree())
ax1.set_extent([260, 311, 4, 40], crs=ccrs.PlateCarree())
ax1.coastlines()
magnitude = (U10 ** 2 + V10 ** 2) ** 0.5
#magnitude.shape
ax1.streamplot(lon, lat, U10, V10, transform=vec_crs,
linewidth=2, density=2, color=magnitude)
ax1.quiver(lon[::5],lat[::5],U10[::5,::5],V10[::5,::5],scale=200.0,color='b',transform=data_crs)
plt.savefig('foo.png', bbox_inches='tight')
plt.show()